![]()

グリッドなしで深度スライスイメージ |
|
|
使用機器:Noggin500MHzアンテナ スマートカートシステム |
多くのGPRユーザーにとってグリッドを設置する作業はあまり気の進むものではないようです。時間もかかるし、簡単ではないからです。 GPRデータのほとんどは、深度スライスか3Dボクセル立方体での表示形式になります。しかし多くのユーザーにとって、グリッドを設置して、それに沿ってデータを収集するという作業は、気が進まないものです。 グリッドが有効な理由として、探査エリアをすべて網羅することができ、データの正確な位置情報が得られ、すべてのトレースに一定の方向性をもたせて、空間的でシステマチックなデータ処理ができることがあげられます。 しかし他にももっと簡単に、データを収集し、すべてのトレースの位置情報を把握できる方法はないものでしょうか?答えはYesです。 もっとも正確なGPSはRTK (リアルタイムキネマチック)GPSです。 しかしRTK GPSが必ずしも必要というわけではありません。手ごろな価格のディファレンシャルGPS(DGPS)でも、スムーズアルゴリズムやWAAS (Wide Area Aumentation System) のような衛星ベースの位置修正機能を内蔵しており、これにより差異を減らし、GPS(米国)とGLONASS(ロシア)の両方の衛星測位システムにアクセスします。このようなGPSは、深度スライスを構築するために必要な正確な位置情報を提供してくれます。 GPSを併用してGPRデータを収集するときは、グリッドを設定する必要はありません。芝刈り機で芝を刈るのと同じ要領で、探査エリアを一定のパターンで歩き回ればいいのです。ただし、探査エリアが全てカバーされている必要があります。
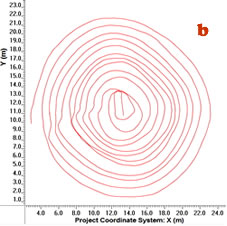
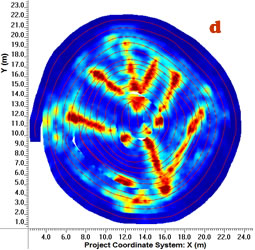
図1:縦横方向ライン(a)とその深度スライス(c)、 らせん状ライン(b)とその深度スライス(d) EKKO ProjectV5ソフトウェアのスライスビューモジュールに新機能が追加されました。収集したラインデータに位置情報を付加させて深度スライスを作成する機能です。 グリッドデータのスライスビューと同様、GPSを利用したラインデータのスライスビューも、深度スライス作成前に、図2が示すいくつかのパラメーターを設定する必要があります。(図2) 図2:GPSベース深度スライスパラメーター もし可能なら、hyperbola-fitting機能を使い、GPR速度を指定することが望まれます。Migrationの過程で、”Velocity”の項目にその値を入力します。もしできなければデフォルトの0.10m/nsを使います。 もう一つ、深度スライスビューに重要な設定値に、”Interpolation distance"があります。通常この値は、探査エリアにおける隣り合う探査ライン間隔の平均値が設定されます。 GPSを併用してデータを収集する方法は、グリッドを設置するのが苦手なユーザーの皆様に好評です。RTK GPSやレーザーセオドライトのような、正確な位置情報を得られる製品でも、近年では価格が安くなっています。グリッドを使用しない探査も増えていくと思われます。 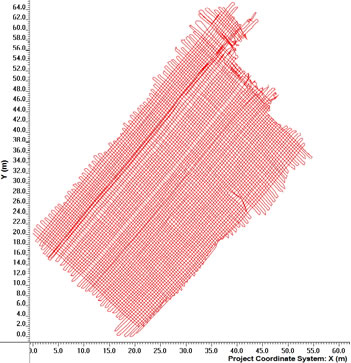 図3a:30x60m GPSによるグリッドなしの探査 (ライン長7,000m,所要時間5時間)  図3:上図aのラインの深度スライスパターン1 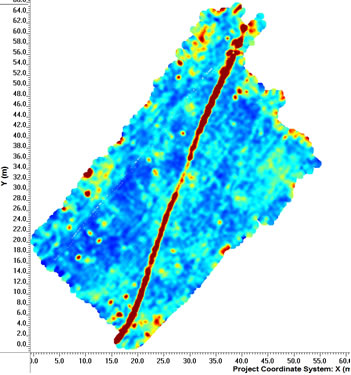 図3:上図aのラインの深度スライスパターン2 |
|



![]()